Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Механическая часть силового канала ЭП.Содержание книги
Поиск на нашем сайте Механическая часть силового канала ЭП. Математическое описание. Динамические моделирование механической части силового канала ЭП. К основным составляющим элементам структурной схемы ЭП относится: 1. силовой канал, по которому осуществляется транспорт потока энергии. 2. информационный канал, по которому реализуется управление отдельными элементами силового канала и информации об их состоянии.
В свою очередь силовой канал ЭП состоит из 2-х частей; - механическая часть силового канала ЭП. - электрическая часть силового канала ЭП.
Связывающим элементом, одновременно входящим в эти части является электромеханический преобразователь (ЭМП). Механическая часть силового канала ЭП. Обобщенная графическая модель (совместная механичная характеристика ЭП).
Если в единой системе координат, в одном из квадратов декартовой плоскости построить механическую характеристику ЭД (
1. Механическая характеристика механизма. Статические 2. Механическая характеристика двигателя. характеристики 3. Совместная механическая характеристика.
Рис.1
Каждая точка всех 3-х характеристик, взятых отдельно описывает статические режимы.
С помощью совместной механической характеристики: 1. Можно судить об устойчивости работы ЭП.
2. Анализировать переходные процессы в ЭП. (строить характеристики
Кроме того при анализе механической части силового канала ЭП зачастую приходится учитывать упругость элементов механической части, наличие передаточных звеньев, результатов чего может являться неравенство скоростей вращения вала двигателя и вала механизма
где
Кроме того для анализа механической части силового канала ЭП используется различные механические модели, которые соответственно имеют различное математическое описание. Наиболее общей и полной моделью механической части силового канала – 2-х массовая механическая модель на которой основные элементы представлены в виде 2-х вращающихся масс (двигатель и механизм)
Рис.2 Рис.2 Представить систему уравнений описывающее движение каждого их трех звеньев в систему (1-я вращающаяся масса с моментом инерции
(2)
Таким образом получили систему 3-х уравнений, которые представляют из себя уравнения движения 2-х массовой модели.
Динамическая модель 2-ч массовой системы в переменных «входы-выходы». Структурная схема 2-х массовой механической системы, Как звена входящую в более сложную систему. Преобразования структурных схем. Предположим, что 2-х массовая механическая система входит как звено в более сложную систему. В этом случае необходимо определить передаточную функцию всей 2-х массовой механической системы, для чего необходимо произвести операцию сворачивания структурной схемы или агрегирования. Произведём эту операцию со структурной схемой №1 приняв:
Рис.7.
2) исключим контур 3) исключим контур Метод пространства состояния. Электромеханические преобразователи. Уравнения описывающие электромеханические преобразователи. Механические характеристики электромеханических преобразователей в различных режимах их работы. ДПТсНВ. Основные уравнения. В двигательном режиме.
Двигательном режимом называется режим, который с точки зрения изменения угловой скорости характеризуется процессом между пуском и остановкой; с точки зрения соотношения напряжения  и и  якорной цепи характеризуется тем, что направлен противоположно двигателя. С точки зрения энергетических соотношений характеризуется тем, что энергия источника питания направлена к двигателю, а механическая энергия двигателя направлена к механизму. якорной цепи характеризуется тем, что направлен противоположно двигателя. С точки зрения энергетических соотношений характеризуется тем, что энергия источника питания направлена к двигателю, а механическая энергия двигателя направлена к механизму.
Естественный характеристикой называется характеристика, построенная в соответствии с уравнениями (4) и (5) при
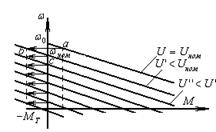
Рис.15. Искусственными механическими характеристиками называются семейства механических характеристик при:
Рис.16
Все искусственные характеристики располагаются ниже естественной т.к. относительно номинального напряжения можно изменить только в сторону уменьшения т.к. увеличение ограничивается диэлектрической прочностью изоляции.
в) Рис.16.
При Если учесть, что Если просуммировать всё семейство механических характеристики, то получим кривую которая функционально описывается гиперболой:
Для построения механической характеристики в двигательном режиме используются паспортные данные двигателя при этом существует 2-а способа построения механических характеристик: 1. Построение механических характеристик в именованных единицах. Чаще всего при отсутствии сведений о сопротивлений обмотки якоря приходиться пользоваться предположением, что электрические потери в обмотке якоря составляет 50% от суммы всех потерь. 2. Построение характеристик в относительных единицах. При этом уравнение характеристик имеет вид:
При этом естественные характеристики описываются следующим образом Механические характеристики ДПТсНВ при пуске. Процесс пуска ДПТ связан с возникновением в момент подключения питающей сети так называемого «броска тока», что связано с тем, что при Вторая проблема при пуске двигателя любого типа связанная с тем, что при запуске необходимо создать достаточный пусковой момент для ДПТсНВ не является актуальной, как для АД, что обеспечивается
1. Введение в цепь ротора добавочных При этом Подбором
В тормозных режимах. К способам искусственного электрического торможения ДПТсНВ относятся: Рекуперативное Противовключением Динамическое При этом во всех 3-х случаях со стороны механизма двигатель работает в режиме потребления энергии,т.е. в генераторном режима со стороны питающей сети генераторный режим обеспечивает только рекуперативным торможении. Механические характеристики ДПТсНВ при рекуперативном торможении. Рекуперативное торможение характерно тем что в момент торможения, скорость вращения вала двигателя больше чем скорость идеализированного холостого хода т.е. в момент торможения В этом случае
При этом т.е. ток в цепи изменяет своё направление и соответственно изменяет своё направление
Рис.19
Таким образом рассмотренный способ может применяться только при спуске груза. Практическое применение для остановки двигателя возможно при снижении напряжения.
Рис.20
Уравнение будет иметь вид:
В процессе рекуперативного торможения потоки энергии в ЭП направлены следующим образом. Кинетическая энергия вращения вала:
где а Направлена от механизма к двигателю. Эл. энергия, которую мы выражаем Т.о. уравнение энергетического баланса ЭП при рекуперативном торможении имеет вид:
Энергетические процессы. Кинетическая энергиявращения вала (вращения механизма) отрицательна т.е. энергия направлена от механизма к двигателю электрическая энергия энергия рассеивания
Т.о и электрическая энергия, потребления двигателем из сети и механическая энергия, потребляемая двигателем от механизма рассеивания в виде тепла. Если учесть, что
Динамическое торможение.
Якорная обмотка двигателя отключается от источника питания сети и замыкается на тормозное сопротивление, т.е.:
При сохранении потока,
т.е. особенность динамического торможения точная остановка двигателя (при
Наклон механической характеристики зависит от величины тормозного сопротивления, которое вводиться для ограничения
Х.Х. ДР- двигательный режим К.З. Пусковой режим двигателя Тормозные режимы ДПВ. В тормозном режиме. Механические характеристики ДПВ не пересекают оси ординат, а следовательно не могут располагаться во2-ом квадранте координатной плоскости, следовательно рекуперативное торможение для ДПВ является не возможным. Кроме того, учитывая, что обмотки якоря и ОВ соединены между собой последовательного изменить соотношение направлений С этой целью зажимы двигателя отключают от питающей сети и замыкают га тормозное сопротивление Этот процесс возникновения тормозного момента является процессом самовозбуждения. Смысл этого режима: при отключении питающей сети в обмотке возбуждения остаётся небольшой остаточный магнитный поток, который наводит в якорной обмотке ЭДС, под действием которого в замкнутой цепи протекает Чтобы процесс самовозбуждения при динамическом торможении был возможен в установившемся режиме необходимо
Рис.38 Рис.39
Если Динамическая модель ЭП с ДПВ в области нагрузок на валу близких к номинальному, представлена также, как модель ДНВ.
ДПТ смешанного возбуждения. Этот вид двигателя совмещает свойства двигателей НВ и ПВ, а именно скорость идеального Х.Х у них определяется составляющей магнитного потока, созданная независимой ОВ. Но при этом характеристики остаются существенно нелинейными и обладают важнейшим свойством: большими значениями
Режимах работы. Чтобы получить уравнения механических характеристик АД используем упрощенную схему замещения АД.
Рис. 40 Приведенная Г-образная схема замещения АД.
В этой схеме замещения реальные электромагнитные связи между статором и ротором заменены электрическими (гальваническими). Кроме того в этой схеме замещения параметры обмотки ротора приведены к параметрам фазы статорной обмотки. а также в схеме замещения учитывается механическая нагрузка на валу двигателя:
Будем считать потери двигателя равными 0, следовательно:
уравнение 28 – зависимость Если в (1) подставим значение
то получим характеристик зависимости момента от скольжения, а также
1. 2.
Рис.41 Рис.42
Обе характеристики имеют ярко выраженные точки экстремума. При этом область Найденное значение
Поставив (30) в (28), решим его относительно
В этих уравнениях (30,31) знак «+»- двигательный режим, «-»- генераторный режим. Следовательно
Механические характеристики, построенные в соответствии с уравнением (28-32)- механические характеристики в параметрических координатах. Если они построены при Построим семейства искусственных характеристик в двигательном режиме при изменении одного из трех параметров (далее рассмотрим только в двигательном режиме). 1.
а) б) Рис.43
При увеличении 2.
а) б) Рис.44 1. При 2. 3. 3.
а) б) Рис.45
При При Представленное семейство механических характеристик было построено на основании уравнений 28-32. Эти расчёты требуют сложных и громоздких промежуточных расчётов, в которых определяют в частности активное и индуктивное сопротивление обмоток статора и ротора. Эти расчёты при решении некоторых инженерных задач могут быть неоправданны, поэтому используют метод построения механических характеристик с применением формулы Клосса который позволяет использовать для этой цели паспортные данные двигателя.
Пуск АД. АДС КЗ ротором является наиболее простым, дешевым и одним из самых надёжных типов ЭД, следовательно в промышленном ЭП находят наиболее широкое применение. В начальный момент обеспечивает достаточно большое значение момента. Для ЭП малой мощности к тому же не обладают большими пусковыми токами, следовательно в ЭП с КЗ АД малой мощности используют прямой пуск. В ЭП средней и большой мощности задача пуска несколько сложнее. Это связан6о с тем, что где
При этом в уравнении (36) не учитывается влияние на магнитный поток скорости и угла поворота ротора.
Сдвиг фаз между
Величина тока пускового При запуске АД в ЭП средней и большой мощности основными задачами являются: 1. ограничение пускового 2. увеличение пускового Если внимательно изучить уравнение (32), но нетрудно убедиться, что 1-ая задача может быть решена введением 1. снизить 2. увеличить составляющую
Рис.49
Тормозные режимы АД. Рекуперативное торможение. Условие возникновения: При этом скольжение:
При этом изменит своё направление также и ток статора
При рекуперативном торможении механическая энергия от механизма передаётся двигателю, где преобразуется в электрическую. При этом большая часть этой энергии возвращается в питающую сеть в виде электрической, а остаток рассеивается в двигателе, в виде тепла. Рекуперативный режим с целью торможения имеет весьма ограниченную область применения: обеспечение плавности при спуске грузов в ЭП грузоподъемных механизмов. Для практического применения режим рекуперативного торможения может быть реализован за счёт изменения соотношения Существует 2 принципа возможности достижения этого соотношения: 1. увеличение числа пар полюсов 2. изменение частот
Рис.53 Этот способ позволяет уменьшить
2. Чтобы полностью остановить двигатель 1-ый скачок частоты должен быть насколько велик, чтобы рабочая точка перешла во второй квадрант, а остальные настолько малы, чтобы характеристика вновь не вернулась в 1-ый.
Режим противовключения. Динамическое торможение.
Динамическое торможение в настоящее время является наиболее универсальным способом торможения Интенсивность процесса динамического торможения зависит от величины приложенного постоянного напряжения и от величины добавочного сопротивления, включаемых в цепь статора (для ограничения нагрева двигателя, т.е. для ограничения тока).
Рис.57 | |||||||||||||||||
|
| Поделиться: |

 ) и механическую характеристику механизма (
) и механическую характеристику механизма ( ) и для одних из тех же значений
) и для одних из тех же значений  определить арифметическую разность
определить арифметическую разность  , то мы получим динамический (избыточный) момент. Полученная зависимость
, то мы получим динамический (избыточный) момент. Полученная зависимость  - совместная механическая характеристика ЭП или обобщенная графическая модель электрической машины.
- совместная механическая характеристика ЭП или обобщенная графическая модель электрической машины.

 - коэффициент устойчивости
- коэффициент устойчивости  - устойчива
- устойчива - неустойчива
- неустойчива
 ).
). зачастую для последующего анализа механики ЭП приходиться использовать приведенные моментов инерции, жесткостей отдельных элементов к валу ЭД.
зачастую для последующего анализа механики ЭП приходиться использовать приведенные моментов инерции, жесткостей отдельных элементов к валу ЭД. ;
; - приведенный статический момент сопротивления
- приведенный статический момент сопротивления - передаточное число.
- передаточное число. - приведенный момент инерции
- приведенный момент инерции - приведенная жесткость
- приведенная жесткость
 , 2-я вращающаяся масса
, 2-я вращающаяся масса  , и связь).Используем метод применяемый в механике которая состоит в том, что система расчленяется на отдельные звенья и при этом реальные звенья заменяются воздействием каждого звена друг на друга. В качестве меры этого воздействия используем момент упругости.
, и связь).Используем метод применяемый в механике которая состоит в том, что система расчленяется на отдельные звенья и при этом реальные звенья заменяются воздействием каждого звена друг на друга. В качестве меры этого воздействия используем момент упругости. (1)
(1) (3)
(3) , тогда
, тогда  а
а 


 1) т.
1) т.  переносим в т.
переносим в т. 
 отсюда получим:
отсюда получим:

 ,
,  и
и 

 ,
,  ,
,  - реостатная.
- реостатная.






 ;
;
 . Для построения такой характеристики достаточно знать номинальное кпд двигателя.
. Для построения такой характеристики достаточно знать номинальное кпд двигателя. , ток в цепи якоря:
, ток в цепи якоря:  и при
и при  . Если учесть, что сопротивление якорной обмотки по отношению к номинальному сопротивлению двигателя:
. Если учесть, что сопротивление якорной обмотки по отношению к номинальному сопротивлению двигателя:  составляет величину не больше 5-10% превышение тока в момент пуска по отношению к номинальному
составляет величину не больше 5-10% превышение тока в момент пуска по отношению к номинальному  .
. , поэтому начальный
, поэтому начальный  у ДПТ должен обеспечивать соотношение
у ДПТ должен обеспечивать соотношение  , для этого существует 2-а способа:
, для этого существует 2-а способа:

 .
. , это имеет место в том случае, если двигатель работает в режиме спуска груза.
, это имеет место в том случае, если двигатель работает в режиме спуска груза. , и под действием
, и под действием  , двигатель
, двигатель вращается с большей скоростью, чем
вращается с большей скоростью, чем  .
. т.е. момент становится тормозным
т.е. момент становится тормозным  .
.
 Если последовательно, уменьшать напряжение, подводимое к якорю, то можно в режиме рекуперативного торможения полностью остановить двигатель.
Если последовательно, уменьшать напряжение, подводимое к якорю, то можно в режиме рекуперативного торможения полностью остановить двигатель. - знак «перепад скоростей», отличается «+», так как момент отрицательный.
- знак «перепад скоростей», отличается «+», так как момент отрицательный.
 ;
;
 ;
; также изменит своё направление и будет направлена от двигателя к источнику эл. энергии, т.е. двигатель по отношению к механизму и по отношению к источнику напряжения (источнику питания) работает в генераторном режиме с отдачей энергии в сеть. Этот режим является наиболее энергетически эффективным, следовательно наиболее экономичном. Энергия рассеивания, пропорциональна
также изменит своё направление и будет направлена от двигателя к источнику эл. энергии, т.е. двигатель по отношению к механизму и по отношению к источнику напряжения (источнику питания) работает в генераторном режиме с отдачей энергии в сеть. Этот режим является наиболее энергетически эффективным, следовательно наиболее экономичном. Энергия рассеивания, пропорциональна  и
и  цепи якоря своего направления не меняет, т.е.
цепи якоря своего направления не меняет, т.е. 
 .
.
 своего знака не изменяет, т.к.
своего знака не изменяет, т.к. 
 или
или 
 , и момент достигает очень больших значений. Можно сделать вывод, что торможения противовключением для приводов большой мощности не применимо, т.к. может привести к выходу двигателя из строя.
, и момент достигает очень больших значений. Можно сделать вывод, что торможения противовключением для приводов большой мощности не применимо, т.к. может привести к выходу двигателя из строя.
 и по отношению к направлению скорости
и по отношению к направлению скорости 


 ).
).
 Уравнение механической характеристики
Уравнение механической характеристики 
 .
. , т.о. вся механическая энергия, потребляемая двигателем от механизма рассеивается в виде тепла в двигателе:
, т.о. вся механическая энергия, потребляемая двигателем от механизма рассеивается в виде тепла в двигателе:
 и магнитного потока возбуждений становится невозможным, следовательно торможение противовключением реализовать в ДПВ, так же невозможно, поэтому единственный возможный способ торможения- динамическое торможение.
и магнитного потока возбуждений становится невозможным, следовательно торможение противовключением реализовать в ДПВ, так же невозможно, поэтому единственный возможный способ торможения- динамическое торможение. , однако характер процессов, протекающих при динамическом торможении в ДПВ существенно, отличается от процессов протекающих в ДНВ.
, однако характер процессов, протекающих при динамическом торможении в ДПВ существенно, отличается от процессов протекающих в ДНВ. процесс становится установившимся.
процесс становится установившимся.

 , то функции
, то функции  и
и  не будут иметь общих точек, следовательно процесс самовозбуждения не может быть установившемся и при таких условиях динамического торможения станет невозможным.
не будут иметь общих точек, следовательно процесс самовозбуждения не может быть установившемся и при таких условиях динамического торможения станет невозможным.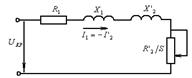
 -
-  приложенное к фазе статорной обмотке;
приложенное к фазе статорной обмотке; - ток фазы статорной обмотки;
- ток фазы статорной обмотки; - приведенный ток в обмотке ротора, без учёта влияния ветви намагничивания;
- приведенный ток в обмотке ротора, без учёта влияния ветви намагничивания; - активное сопротивление фазы обмотки статора;
- активное сопротивление фазы обмотки статора; - индуктивное сопротивление статора;
- индуктивное сопротивление статора; - приведенное индуктивное сопротивление ротора;
- приведенное индуктивное сопротивление ротора; - приведенное активное сопротивление ротора с учётом механической нагрузки на его валу;
- приведенное активное сопротивление ротора с учётом механической нагрузки на его валу; - скольжение
- скольжение - скорость ВМП
- скорость ВМП (28)
(28) ), которая в свою очередь определяет
), которая в свою очередь определяет  (29)
(29)


 описывает двигательный режим работы (
описывает двигательный режим работы ( ), а область характеристик
), а область характеристик  описывает генераторный режим при котором
описывает генераторный режим при котором  в генераторном режиме больше, чем значения
в генераторном режиме больше, чем значения  (30)
(30) (31)
(31) . т.е. при неподвижном роторе (пускового момента):
. т.е. при неподвижном роторе (пускового момента): (32)
(32) ,
,  и при отсутствии добавочных сопротивлений в цепи ротора (
и при отсутствии добавочных сопротивлений в цепи ротора ( ), то такие характеристики называют естественными, в противном случае искусственными.
), то такие характеристики называют естественными, в противном случае искусственными. - реостатные характеристики.
- реостатные характеристики.
 , вводимого в цепь ротора
, вводимого в цепь ротора  растёт (чем выше активное сопротивления ротора, тем больше
растёт (чем выше активное сопротивления ротора, тем больше 
 перегрузочная способность двигателя.
перегрузочная способность двигателя. возможность успешного запуска двигателя.
возможность успешного запуска двигателя. жесткость характеристик в рабочей части.
жесткость характеристик в рабочей части.

 и
и 
 и
и 
 (36)
(36) - конструктивная электромагнитная постоянная двигателя, которая зависит от числа пар полюсов двигателя и способов наматывания статорной и роторной обмотки.
- конструктивная электромагнитная постоянная двигателя, которая зависит от числа пар полюсов двигателя и способов наматывания статорной и роторной обмотки. - основной магнитный поток.
- основной магнитный поток. - ток в роторе
- ток в роторе - угол сдвига фаз между ЭДС и тока ротора.
- угол сдвига фаз между ЭДС и тока ротора. Уравнение (36) можно проиллюстрировать следующей векторной диаграммой.
Уравнение (36) можно проиллюстрировать следующей векторной диаграммой. и
и  .
. Величина индуктивного сопротивления
Величина индуктивного сопротивления  будет наибольшей. Будет иметь место эффект вытеснения
будет наибольшей. Будет иметь место эффект вытеснения  , что приведёт к понижению пускового момента. Кроме того, при неподвижном роторе относится скорость пересечения силовыми линиями магнитного поля витков ротора также будет наибольшим:
, что приведёт к понижению пускового момента. Кроме того, при неподвижном роторе относится скорость пересечения силовыми линиями магнитного поля витков ротора также будет наибольшим: - скорость изменения магнитного потока.
- скорость изменения магнитного потока. - наибольшая ЭДС в обмотке ротора.
- наибольшая ЭДС в обмотке ротора. может привести к перегреву двигателя.
может привести к перегреву двигателя. .
. .
. Этот способ может быть применим только для двигателя с фазным ротором. При этом пусковые характеристики представляет из себя семейство реостатных, где число ступеней чаще всего известно заранее.
Этот способ может быть применим только для двигателя с фазным ротором. При этом пусковые характеристики представляет из себя семейство реостатных, где число ступеней чаще всего известно заранее. становится отрицательным.
становится отрицательным.

 В результате изменяется соотношение направления пересечения силовых линий магнитного поля витков ротора
В результате изменяется соотношение направления пересечения силовых линий магнитного поля витков ротора  .
. , при этом
, при этом 

 1.
1. Кроме того необходимым условием реализации генераторного режима по отношению к сети является возможность обратной проводимости в элементе, связывающим двигатель с сетью.
Кроме того необходимым условием реализации генераторного режима по отношению к сети является возможность обратной проводимости в элементе, связывающим двигатель с сетью. , главное отличительное качество динамического торможения – точность.
, главное отличительное качество динамического торможения – точность.